




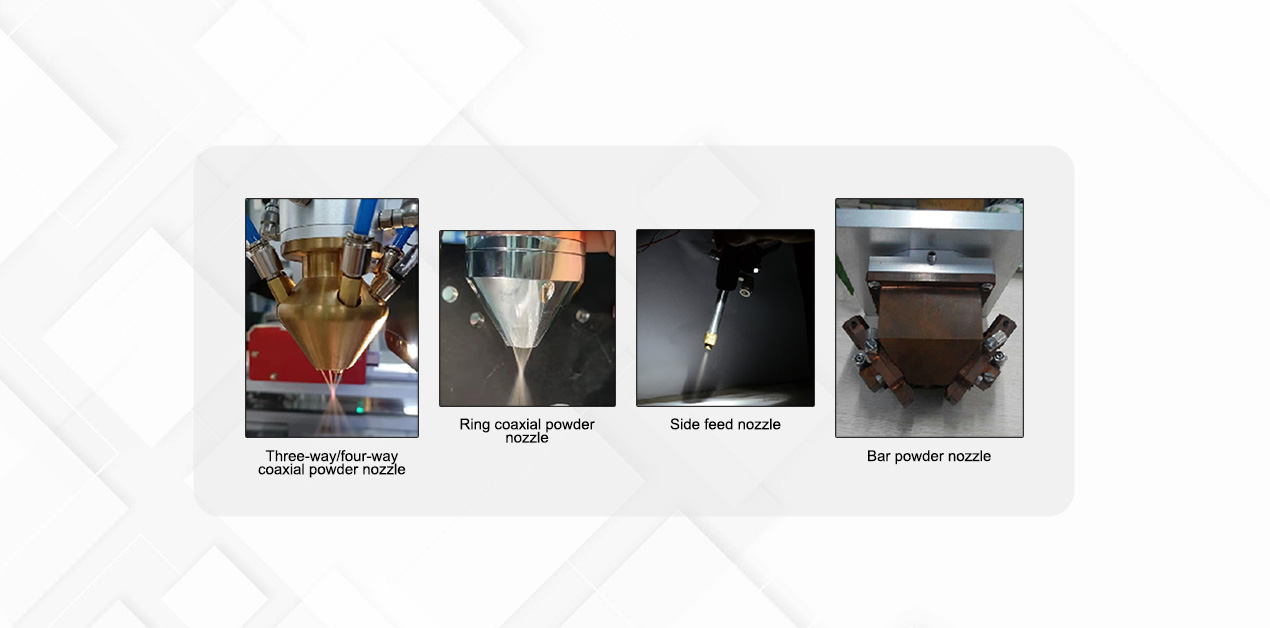
Pulbri etteande otsik
1. Kolme-/neljasuunaline koaksiaalne pulbri etteandeotsik: pulber väljub otse kolme-/neljasuunalisest otsikust, koondub ühes punktis, lähenemispunkt on väike, pulbri suunda mõjutab gravitatsioon vähem ja suund on hea, sobib kolmemõõtmeliseks laserrestaureerimiseks ja 3D-printimiseks.
2. Rõngakujuline koaksiaalne pulbri etteandeotsik: Pulber siseneb kolme või nelja kanali kaudu ja pärast sisemist homogeniseerimist väljub pulber ringikujuliselt ning koondub. Koonduvuspunkt on suhteliselt suur, kuid ühtlasem ja sobib paremini suurte täppidega lasersulatamiseks. See sobib laserplakaadiks kaldenurgaga kuni 30°.
3. Külgmine pulbri etteandeotsik: lihtne konstruktsioon, madal hind, mugav paigaldus ja reguleerimine; pulbri väljalaskeavade vaheline kaugus on suur ja pulbri ning valguse juhitavus on parem. Kuid laserkiir ja pulbri sisend on asümmeetrilised ning skaneerimise suund on piiratud, mistõttu ei saa see üheski suunas tekitada ühtlast kattekihti ja seetõttu ei sobi see 3D-kattekihiks.
4. Ribakujuline pulbri etteandeotsik: pulbri sisestamine mõlemale poole, pärast homogeniseerimist pulbri väljundmooduliga, väljundribakujuline pulber ja kogunemine ühes kohas, moodustades 16 mm * 3 mm (kohandatava) ribakujulise pulbritäpi ja vastava ribakujuliste täppide kombinatsiooni abil saab teostada suureformaadilist laserpinna parandamist ja oluliselt efektiivsust parandada.
Pulbri dosaator
Topelttünniga pulbrisööturi peamised parameetrid
Pulbridosaatori mudel: EMP-PF-2-1
Pulbri etteande silinder: kahesilindriline pulbri etteandesüsteem, PLC-st sõltumatult juhitav
Juhtimisrežiim: kiire vahetamine silumis- ja tootmisrežiimi vahel
Mõõtmed: 600mmX500mmX1450mm (pikkus, laius ja kõrgus)
Pinge: 220 V vahelduvvool, 50 Hz;
Võimsus: ≤1kw
Saadetava pulbri osakeste suurus: 20-200 μm
Pulbri etteandeketta kiirus: 0-20 p/min astmevaba kiiruse reguleerimine;
Pulbri söötmise kordustäpsus: <±2%;
Vajalik gaasiallikas: lämmastik/argoon
Muu: Operatsiooniliidest saab vastavalt vajadusele kohandada


Laserpüromeeter
Suletud ahelaga temperatuuri reguleerimine, näiteks laseriga karastamine, plakeerimine ja pinnatöötlus, võimaldab täpselt säilitada servade, eendite või aukude kõvenemistemperatuuri.
Katsetemperatuuride vahemik on 700 ℃ kuni 2500 ℃.
Suletud ahelaga juhtimine, kuni 10 kHz.
Võimsad tarkvarapaketid
protsessi seadistamine, visualiseerimine ja
andmesalvestus.
Tööstuslikud I/O klemmid 24V digitaalsete ja analoogsete 0-10V I/O-dega automatiseerimisliinile
integratsioon ja laserühendus.
Laserkatte eelised

Laserkatte rakendused
●Autotööstuses, näiteks mootori ventiilid, silindrite sooned, hammasrattad, väljalaskeventiilide pesad ja mõned osad, mis vajavad suurt kulumiskindlust, kuumakindlust ja korrosioonikindlust;
● Lennundustööstuses plakeeritakse titaanisulamite pinnale mõned sulamipulbrid, et lahendada titaanisulamite probleemi. Puudusteks on suur hõõrdetegur ja halb kulumiskindlus;
●Pärast seda, kui vormitööstuses on vormi pinda töödeldud laserkattega, paranevad oluliselt selle pinna kõvadus, kulumiskindlus ja kõrge temperatuuritaluvus;
●Laserkattega rullide kasutamine terasetööstuses on muutunud väga tavaliseks.
Laserkatte rakendused
Kui soovite teada, kas laserplakeerimine sobib teile, peate teatama järgmistest punktidest:
1. Mis materjalist teie toode on; millist materjali on vaja katta;
2. Toote kuju ja suurus, on kõige parem esitada fotod;
3. Teie konkreetsed töötlemisnõuded: töötlemisasend, laius, paksus ja toote toimivus pärast töötlemist;
4. Vajadus töötlemise efektiivsuse järele;
5. Milline on kulunõue?
6. Laseri tüüp (kiudoptiline või pooljuhtlaser), võimsus ja soovitud fookuse suurus; kas tegemist on tugiroboti või tööpingiga;
7. Kas olete laserplakaadimisprotsessiga tuttav ja kas vajate tehnilist tuge?
8. Kas laserkiirenduse pea kaalu kohta on täpsed nõuded (roboti toetamisel tuleks eriti arvestada roboti koormusega);
9. Milline on tarneaja nõue?
10. Kas vajate tõestust (tugitõendust)?







